🚀 Projects
Robust Locomotion of Legged Robots
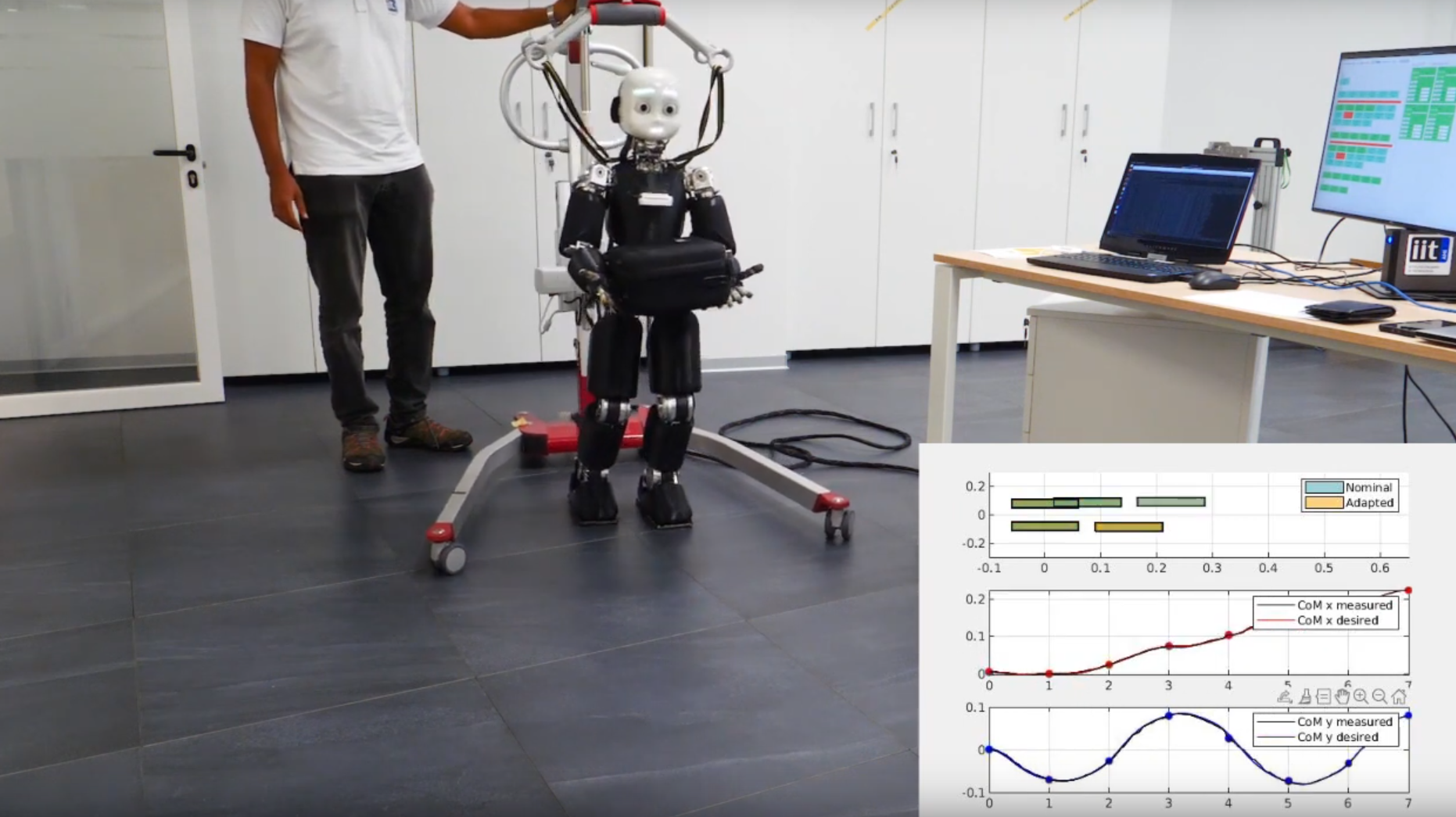
Research on developing locomotion controllers with robustness and closed-loop stability certificates for legged robots, including both bipedal humanoids and quadrupeds. The project focuses on Model Predictive Control (MPC) for centroidal dynamics with adaptive control techniques, validated on real hardware including the ergoCub humanoid and Aliengo quadruped.
Key Technologies: Centroidal MPC, Adaptive Control, Real-time Optimization, C++, Python, MATLAB
🔗 View on GitHub | 📄 Read RA-L Paper | 📄 Read ICRA Paper
Human Robot Interaction

Research on validating the ergoCub humanoid for physical Human-Robot Interaction (pHRI), specifically in collaborative payload transport scenarios. The work demonstrates the robot's capacity to perform joint tasks, such as walking with a human partner while carrying a shared load, without explicit prior knowledge of the human's ergonomic model.
The control architecture extends robust locomotion frameworks with: * Relative Distance Regulation: Constraining the robot to maintain a fixed distance from the walking partner. * Contact Maintenance: Using Inverse Kinematics tasks to ensure stable grasping of the payload during motion. * Ergonomic Validation: Utilizing wearable technology (iFeel suit) to monitor human lower-back torque (L5S1) ensuring repeatable and safe interaction dynamics.
Key Technologies: pHRI, Inverse Kinematics, Wearable Sensors (iFeel), Ergonomic Analysis, C++, YARP
Teleoperation of Robotic Avatars

Development of advanced teleoperation interfaces for robotic avatar systems, enabling intuitive control of humanoid robots through VR devices and specialized peripherals. This is a joint research initiative with Honda R&D on their avatar robot platform. The system provides real-time bilateral control with force feedback for both locomotion and manipulation tasks, successfully demonstrated on iCub, ergoCub, and Honda's avatar robot.
Key Technologies: VR Interfaces, C/C++ Real-time Control, YARP Middleware, Quadratic Programming, Walking Controllers
🔗 View on GitHub | 📄 Read IntelliSys Paper 📄 Read Science Robotics Paper | 📄 Read IEEE Telepresence Paper |
PhD Thesis - Sampled-Data Nonlinear Control

My doctoral research focused on sampled-data control approaches for systems where partial dynamics cancellation is required, with applications in robotics and control systems. The thesis presents novel sampled-data control techniques, stability analysis for hybrid systems, and experimental validation on real hardware.
Thesis: A sampled-data approach in control problems involving partial dynamics cancellation
Institutions: University of Paris Saclay (France) & Sapienza University of Rome (Italy)
📄 Read Thesis | 🎥 Watch Videos
Personal Projects & Open Source
I contribute to various open-source projects in robotics, control systems, and software development. My repositories include libraries supporting published research papers, educational materials for control theory and robotics short tutorials, and experimental tools for prototyping and visualization. Technologies span C++, Python, MATLAB, ROS, YARP, and Gazebo.
Focus Areas: Control System Libraries, Robotics Software, Hardware Interfaces